작품 소개
알람 시간을 설정해 두면 해당 시간에 알람(아기상어)이 울리면서 임의의 방향으로 방향을 바꾸면서 버튼을 누를 때까지 계속 도망다니는 로봇입니다.
본 작품은 무지개 지역 아동센터 교육 중 자유작품으로 아이들과 함께 기능을 구상하여 제작하였습니다.
주요 부품
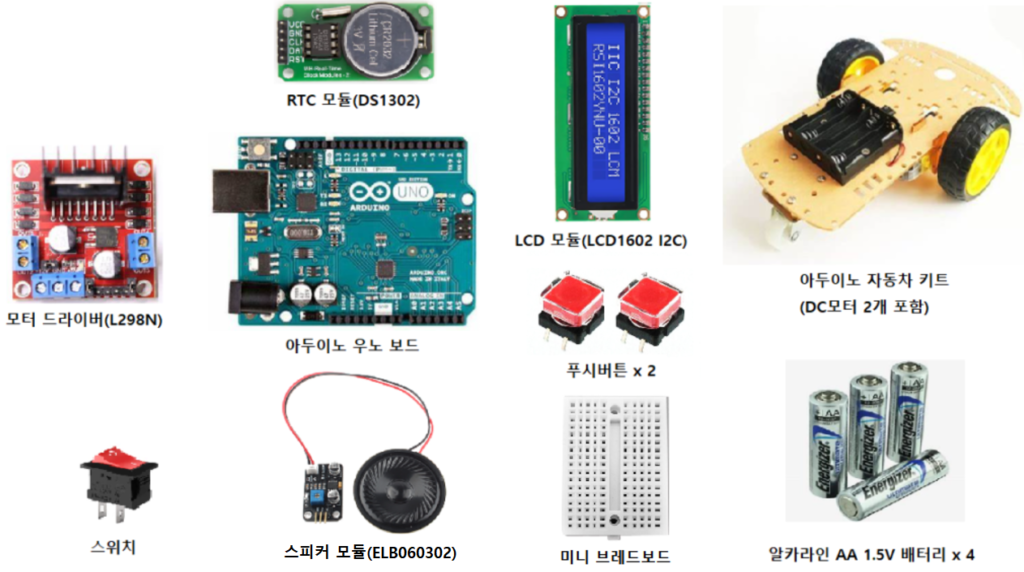
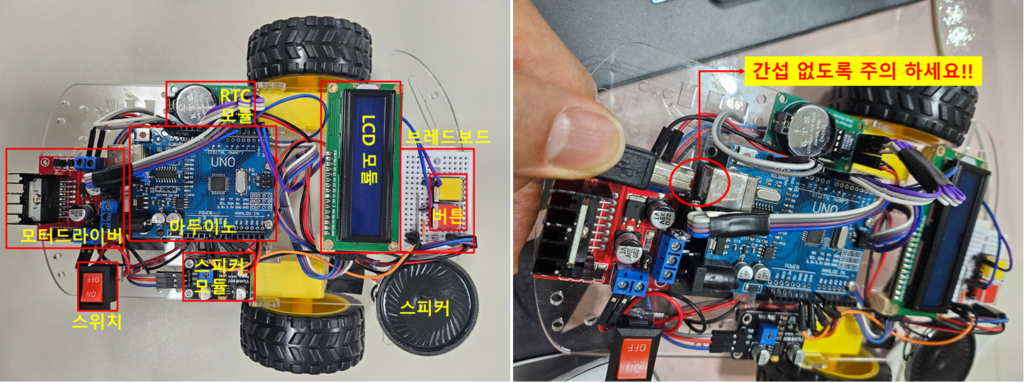
1. RTC 모듈: 별도의 외부 전원 없이도 현재 시간을 저장하고 지속 갱신합니다.
2. 모터 드라이버: 바퀴 구동을 위한 DC 모터 2개의 방향 및 속도를 별도 제어합니다. 본 작품에서는 속도는 제어하지 않고 정지 및 최고 속도만 적용합니다.
3. 스위치: 로봇의 전체 전원을 켜거나 끕니다.
4. 스피커 모듈: 설정된 알람 시간이 되면 버튼을 누르기 전까지 아기상어 음악을 송출합니다.
5. 미니 브레드보드: 각 모듈에 전원이나 신호를 배분하기 위해 사용합니다.
6. 푸시버튼: 1개는 알람의 시간을 0~23까지 1시간 단위로 올립니다(23 다음은 다시 0으로). 나머지 1개는 알람의 분을 0~55까지 5분 단위로 올립니다(55 다음은 시간을 1 올리고 분은 다시 0으로).
7. LCD 모듈: 현재 시간을 1초에 1번 갱신하여 보여주고 세팅된 알람 시간도 보여줍니다.
8. 자동차 키트: 차체 및 모터 고정 부품, 수직 동력전달 기어박스 결함된 DC 모터 세트 x 2, 바퀴 x 2, 보조바퀴, 배터리 케이스, 기타 볼트 및 나사류
회로도

| 아두이노 | 액츄에이터 |
| VIN | 배터리 +전원 입력 |
| GND | 배터리 -전원 연결 |
| 5V | 브레드보드 +전원 출력 |
| GND | 브레드보드 -전원 연결 |
| D01 | 시간 버튼 |
| D02 | 분 버튼 |
| D03 | 스피커모듈_IN |
| D04 | 모터드라이버_IN1 |
| D05 | 모터드라이버_IN2 |
| D06 | 모터드라이버_IN3 |
| D07 | 모터드라이버_IN4 |
| D08 | RTC모듈_RST |
| D09 | RTC모듈_DAT |
| D10 | RTC모듈_CLK |
| SDA | LCD모듈_SDA |
| SCL | LCD모듈_SCL |
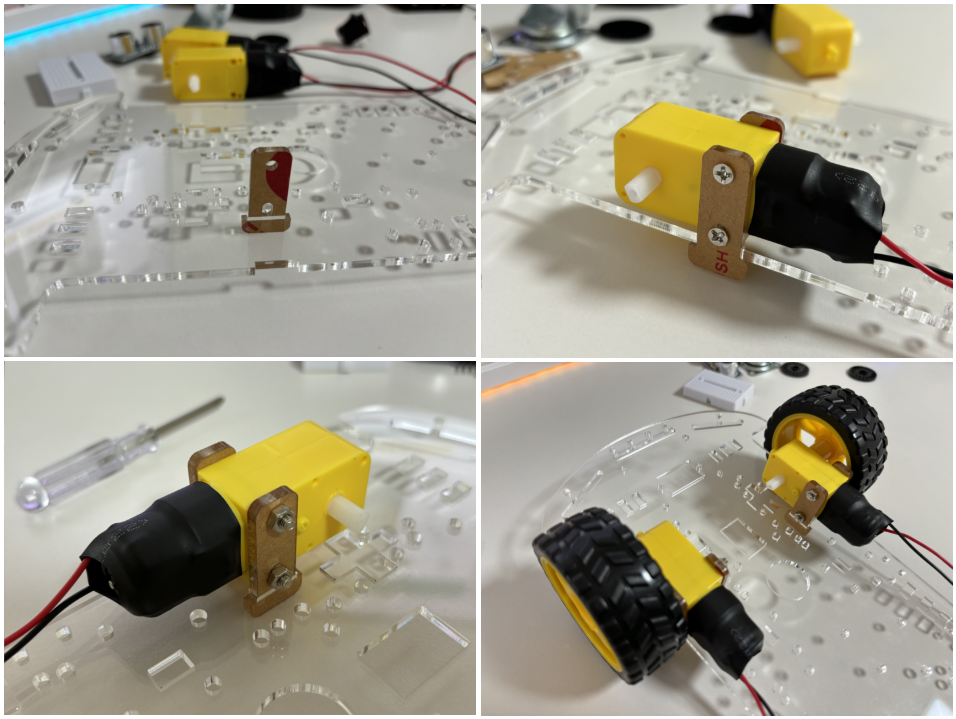
하드웨어 제작/조립 방법
자동차 키트의 모터를 아래와 같이 지지대와 함께 볼트와 너트로 고정 해 주세요. 모터를 다 조립했으면 마지막 사진처럼 바퀴까지 조립 해 주세요.
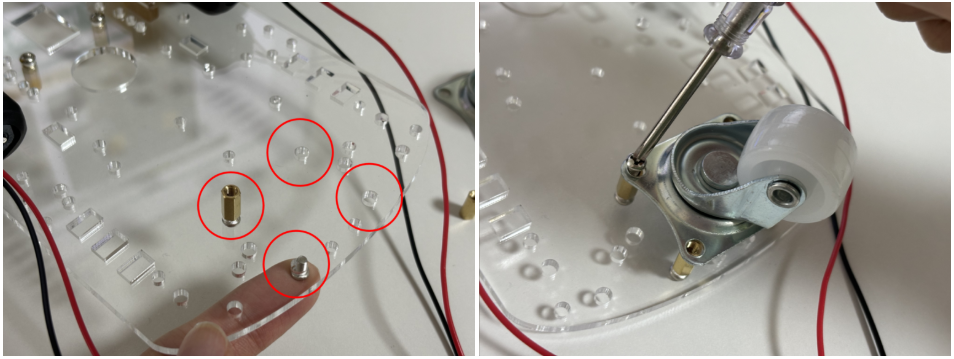
다음은 모터가 있는 차체 아랫 면에 서포터가 부착되도록 지지대 4개를 달아 보조 바퀴를 조립합니다.
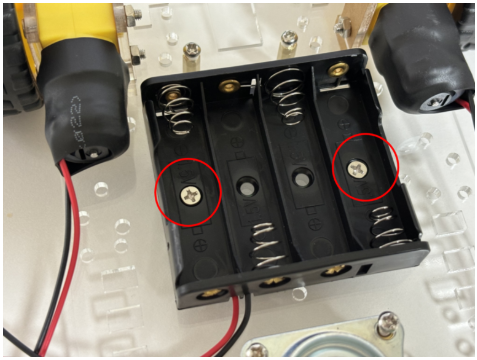
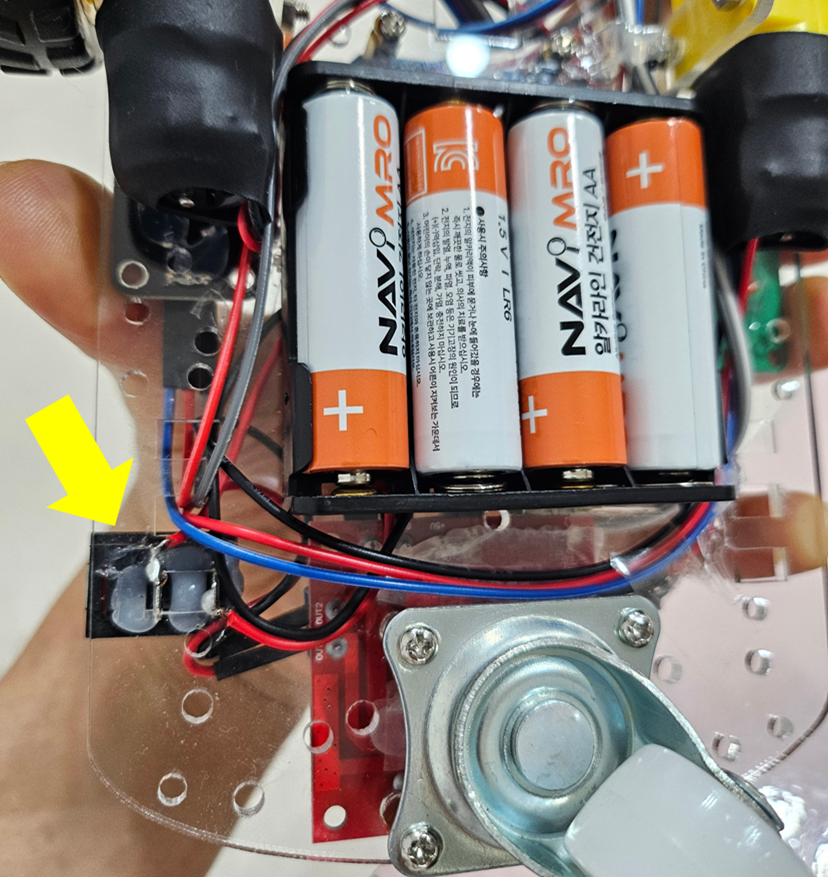
배터리 홀더를 아랫 부분 양 쪽 나사 홈을 통해 고정 해 줍니다.
차체 윗 면에 나머지 부품들을 글루건을 이용 해 아래와 같이(혹은 자유롭게) 고정 시켜 줍니다. 이 때 아두이노 보드의 케이블 연결 부분에 간섭이 일어나지 않도록 주의 해야 합니다. 부품 고정이 완료된 후에는 회로도와 같이 선을 연결 해 주세요.
스위치는 아래와 같이 핀이 차체 아래로 나오도록 고정한 후 전선을 연결합니다(납땜 추천).
코드
아래 코드를 실행하기 위해서는 다음 라이브러리의 설치가 필요합니다.
1. Rtc by Makuna by Michael C. Miller : RTC 모듈의 제어를 위해 필요합니다.
2. LiquidCrystal I2C : LCD 모듈의 제어를 위해 필요합니다.
3. ArduinoThread by Ivan Seidel : 1초에 한 번 LCD에 현재 시간을 표현하는 함수를 Thread 프로그램 화 하기 위해 필요합니다.
#include <Thread.h>
#include <ThreeWire.h>
#include <RtcDS1302.h>
#include <LiquidCrystal_I2C.h>
//-------------------------------------------------------------------------------------
//시계관련
Thread clThread = Thread();
ThreeWire myWire(9,10,8); // IO(DAT), SCLK, CE(RST) 디지털 연결 번호
RtcDS1302<ThreeWire> Rtc(myWire);
LiquidCrystal_I2C lcd(0x27,16,2);
#define countof(a) (sizeof(a) / sizeof(a[0])) // 시계 모듈 년도, 달, 시간, 분, 초 받아오는 함수
RtcDateTime alm;
bool b_almState = true;
unsigned long int millTime = 0;
//-------------------------------------------------------------------------------------
//버튼관련
int BUTTON1 = 1;
int buttonState1, buttonState1_old;
int state1 = 0;
int BUTTON2 = 2;
int buttonState2;
int state2 = 0;
int alm_H = 0;
int alm_M = 0;
int alm_S = 0;
//--------------------------------------------------------------------------------------
//모터관련
int Flag_FWDBWD; // 0:전진, 1:후진
int Flag_DIRECT; // 0:정방향, 1:좌회전, 2:우회전
#define M_IN1 4 // 모터제어 입력 핀 IN1을 Digital4번핀으로 설정
#define M_IN2 5 // 모터제어 입력 핀 IN2을 Digital5번핀으로 설정
#define M_IN3 6 // 모터제어 입력 핀 IN3을 Digital13번핀으로 설정
#define M_IN4 7 // 모터제어 입력 핀 IN4을 Digital12번핀으로 설정
//-------------------------------------------------------------------------------------
//알람관련
// 코드 설명 https://postpop.tistory.com/98
// 12화음 이름 정의
typedef enum {
NOTE_C, NOTE_Cs, NOTE_D, NOTE_Eb, NOTE_E, NOTE_F, NOTE_Fs, NOTE_G, NOTE_Gs,
NOTE_A, NOTE_Bb, NOTE_B, NOTE_MAX
} note_t;
// 화음별 피에조 부저 진동수 정의 및 옥타브에 따른 값 변경 함수
double ledcWriteNote(note_t note, uint8_t octave){
const uint16_t noteFrequencyBase[12] = {
// 1 2 3 4 5 6 7 8 9 10 11 12
// C C# D Eb E F F# G G# A Bb B
4186, 4435, 4699, 4978, 5274, 5588, 5920, 6272, 6645, 7040, 7459, 7902
};
if(octave > 8 || note >= NOTE_MAX){
return 0;
}
double noteFreq = (double)noteFrequencyBase[note] / (double)(1 << (8-octave));
return noteFreq;
}
// ---------------------------------------------------------------------- 아기상어
uint8_t Tempo = 220;
float tempoRatio = float(Tempo)/60.0;
uint8_t KeySign = 0;
uint8_t octaveTemp = 4;
float beatTime = 4/4;
const note_t Mnote[] PROGMEM= {
NOTE_D,NOTE_E,NOTE_D,NOTE_E,NOTE_D,NOTE_E,NOTE_D,NOTE_E,NOTE_D,NOTE_E,NOTE_D,NOTE_E,NOTE_D,NOTE_E,NOTE_D,NOTE_E,
NOTE_G,NOTE_F,NOTE_G,NOTE_A,NOTE_G,NOTE_F,NOTE_D,NOTE_F,NOTE_G,NOTE_F,NOTE_G,NOTE_A,NOTE_G,NOTE_F,NOTE_D,NOTE_F,NOTE_G,NOTE_F,NOTE_G,NOTE_A,NOTE_G,NOTE_F,NOTE_D,NOTE_F,NOTE_A,NOTE_MAX,NOTE_MAX,NOTE_D,NOTE_E,
NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_F,NOTE_F,NOTE_MAX,NOTE_MAX,NOTE_D,NOTE_E,
NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_F,NOTE_F,NOTE_MAX,NOTE_MAX,NOTE_D,NOTE_E,
NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_F,NOTE_F,NOTE_MAX,NOTE_MAX,NOTE_D,NOTE_D,NOTE_E,
NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_F,NOTE_F,NOTE_MAX,NOTE_MAX,NOTE_D,NOTE_E,
NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_F,NOTE_F,NOTE_MAX,NOTE_MAX,NOTE_D,NOTE_E,
NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_D,NOTE_E,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_MAX,NOTE_G,NOTE_G,NOTE_G,NOTE_G,NOTE_F,NOTE_F,NOTE_MAX,NOTE_MAX,NOTE_D,NOTE_F,
NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_E,NOTE_F,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_E,NOTE_F,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_A,NOTE_A,NOTE_G,NOTE_G,NOTE_MAX,NOTE_MAX,NOTE_E,NOTE_F,
NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_E,NOTE_F,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_E,NOTE_F,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_A,NOTE_A,NOTE_G,NOTE_MAX,NOTE_MAX,NOTE_MAX,NOTE_E,NOTE_F,
NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_E,NOTE_F,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_E,NOTE_F,NOTE_A,NOTE_MAX,NOTE_A,NOTE_A,NOTE_B,NOTE_MAX,NOTE_B,NOTE_B,NOTE_B,NOTE_B,NOTE_A,NOTE_E,NOTE_F,NOTE_MAX,NOTE_E,NOTE_F,NOTE_A,NOTE_MAX,NOTE_MAX,
};
const uint8_t Moct[] PROGMEM= {
3,3,3,3,3,3,3,3,4,4,4,4,5,5,5,5,
4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,4,
4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,4,
4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,4,
4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,4,4,
4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,4,
4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,4,
4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,4,
4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,4,
4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,4,
4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,4,4,0,4,4,4,4,4,4,4,0,4,4,4,4,4,
0,
};
const uint8_t localKey[] PROGMEM= {
0,2,0,2,0,2,0,2,0,2,0,2,0,2,0,2,
0,0,0,2,0,0,0,0,0,0,0,2,0,0,0,0,0,0,0,2,0,0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,3,3,0,0,0,0,
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,3,3,0,0,0,0,
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,3,3,0,0,0,0,0,
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,3,3,0,0,0,0,
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,3,3,0,0,0,0,
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,3,3,0,0,3,0,
2,0,2,2,2,0,2,2,2,0,2,0,2,2,2,0,2,2,2,0,2,0,2,2,2,0,2,2,2,2,0,0,0,0,2,0,
2,0,2,2,2,0,2,2,2,0,2,0,2,2,2,0,2,2,2,0,2,0,2,2,2,0,2,2,2,2,0,0,0,0,2,0,
2,0,2,2,2,0,2,2,2,0,2,0,2,2,2,0,2,2,2,0,2,0,2,2,2,0,2,2,2,2,2,2,0,0,2,0,2,0,0,
0,
};
const uint8_t Mdur[] PROGMEM= {
16,
8,8,8,8,4,4,4,4,2,2,2,2,2,2,2,2,
2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,2,4,4,4,
2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,4,4,2,2,
2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,4,4,2,2,
2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,4,2,2,2,2,
2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,4,4,2,2,
2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,4,4,2,2,
2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,4,4,2,2,
2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,4,4,2,2,
2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,4,4,2,2,
2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,2,2,1,1,1,1,2,2,2,2,1,1,1,1,2,2,2,4,
};
// ----------------------------------------------------------------------
uint8_t noteNum = 0;
note_t keySignature(note_t note) {
if (pgm_read_byte(&localKey[noteNum]) == 0) {
if (KeySign == 1) {
if (note == NOTE_B) note = NOTE_Bb;
} else if (KeySign == 2) {
if (note == NOTE_B) note = NOTE_Bb;
else if (note == NOTE_E) note = NOTE_Eb;
} else if (KeySign == 3) {
if (note == NOTE_B) note = NOTE_Bb;
else if (note == NOTE_E) note = NOTE_Eb;
else if (note == NOTE_A) note = NOTE_Gs;
} else if (KeySign == 4) {
if (note == NOTE_B) note = NOTE_Bb;
else if (note == NOTE_E) note = NOTE_Eb;
else if (note == NOTE_A) note = NOTE_Gs;
else if (note == NOTE_D) note = NOTE_Cs;
} else if (KeySign == 5) {
if (note == NOTE_B) note = NOTE_Bb;
else if (note == NOTE_E) note = NOTE_Eb;
else if (note == NOTE_A) note = NOTE_Gs;
else if (note == NOTE_D) note = NOTE_Cs;
else if (note == NOTE_G) note = NOTE_Fs;
} else if (KeySign == 6) {
if (note == NOTE_B) note = NOTE_Bb;
else if (note == NOTE_E) note = NOTE_Eb;
else if (note == NOTE_A) note = NOTE_Gs;
else if (note == NOTE_D) note = NOTE_Cs;
else if (note == NOTE_G) note = NOTE_Fs;
else if (note == NOTE_C) { note = NOTE_B; octaveTemp -= 1; }
} else if (KeySign == 7) {
if (note == NOTE_B) note = NOTE_Bb;
else if (note == NOTE_E) note = NOTE_Eb;
else if (note == NOTE_A) note = NOTE_Gs;
else if (note == NOTE_D) note = NOTE_Cs;
else if (note == NOTE_G) note = NOTE_Fs;
else if (note == NOTE_C) { note = NOTE_B; octaveTemp -= 1; }
else if (note == NOTE_F) note = NOTE_E;
} else if (KeySign == 8) {
if (note == NOTE_F) note = NOTE_Fs;
} else if (KeySign == 9) {
if (note == NOTE_F) note = NOTE_Fs;
else if (note == NOTE_C) note = NOTE_Cs;
} else if (KeySign == 10) {
if (note == NOTE_F) note = NOTE_Fs;
else if (note == NOTE_C) note = NOTE_Cs;
else if (note == NOTE_G) note = NOTE_Gs;
} else if (KeySign == 11) {
if (note == NOTE_F) note = NOTE_Fs;
else if (note == NOTE_C) note = NOTE_Cs;
else if (note == NOTE_G) note = NOTE_Gs;
else if (note == NOTE_D) note = NOTE_Eb;
} else if (KeySign == 12) {
if (note == NOTE_F) note = NOTE_Fs;
else if (note == NOTE_C) note = NOTE_Cs;
else if (note == NOTE_G) note = NOTE_Gs;
else if (note == NOTE_D) note = NOTE_Eb;
else if (note == NOTE_A) note = NOTE_Bb;
} else if (KeySign == 13) {
if (note == NOTE_F) note = NOTE_Fs;
else if (note == NOTE_C) note = NOTE_Cs;
else if (note == NOTE_G) note = NOTE_Gs;
else if (note == NOTE_D) note = NOTE_Eb;
else if (note == NOTE_A) note = NOTE_Bb;
else if (note == NOTE_E) note = NOTE_F;
} else if (KeySign == 14) {
if (note == NOTE_F) note = NOTE_Fs;
else if (note == NOTE_C) note = NOTE_Cs;
else if (note == NOTE_G) note = NOTE_Gs;
else if (note == NOTE_D) note = NOTE_Eb;
else if (note == NOTE_A) note = NOTE_Bb;
else if (note == NOTE_E) note = NOTE_F;
else if (note == NOTE_B) { note = NOTE_C; octaveTemp += 1; }
}
}
else { // 1. natural
if (pgm_read_byte(&localKey[noteNum]) == 2) { // 2. b
if (note == NOTE_C) { note = NOTE_B; octaveTemp -= 1; }
else if (note == NOTE_D) note = NOTE_Cs;
else if (note == NOTE_E) note = NOTE_Eb;
else if (note == NOTE_F) note = NOTE_E;
else if (note == NOTE_G) note = NOTE_Fs;
else if (note == NOTE_A) note = NOTE_Gs;
else if (note == NOTE_B) note = NOTE_Bb;
}
else if (pgm_read_byte(&localKey[noteNum]) == 3) { // 2. #
if (note == NOTE_C) note = NOTE_Cs;
else if (note == NOTE_D) note = NOTE_Eb;
else if (note == NOTE_E) note = NOTE_F;
else if (note == NOTE_F) note = NOTE_Fs;
else if (note == NOTE_G) note = NOTE_Gs;
else if (note == NOTE_A) note = NOTE_Bb;
else if (note == NOTE_B) { note = NOTE_C; octaveTemp += 1; }
}
else if (pgm_read_byte(&localKey[noteNum]) == 4) { // 4. bb
if (note == NOTE_C) { note = NOTE_Bb; octaveTemp -= 1; }
else if (note == NOTE_D) note = NOTE_C;
else if (note == NOTE_E) note = NOTE_D;
else if (note == NOTE_F) note = NOTE_Eb;
else if (note == NOTE_G) note = NOTE_F;
else if (note == NOTE_A) note = NOTE_G;
else if (note == NOTE_B) note = NOTE_A;
}
else if (pgm_read_byte(&localKey[noteNum]) == 5) { // 5. ##
if (note == NOTE_C) note = NOTE_D;
else if (note == NOTE_D) note = NOTE_E;
else if (note == NOTE_E) note = NOTE_Fs;
else if (note == NOTE_F) note = NOTE_G;
else if (note == NOTE_G) note = NOTE_A;
else if (note == NOTE_A) note = NOTE_B;
else if (note == NOTE_B) { note = NOTE_Cs; octaveTemp += 1; }
}
}
return note;
}
// ----------------------------------------------------------------------
int beepPin = 3;
bool beepMelody = false;
unsigned long int beepTime = 0;
//==========================================================================================================
void setup() { // 초기화
//Serial.begin(9600);//xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
//lcd 초기화
lcd.init();
lcd.backlight();
lcd.setCursor(0,0);
Rtc.Begin();
//Rtc.GetDateTime();
//RTC 모듈 최초 실행 시 현재 시간을 세팅해 주어야 함. 이후에는 아래 line 주석 처리
//RtcDateTime compiled = RtcDateTime(2024, 11, 23, 13, 27, 00);
pinMode(BUTTON1, INPUT_PULLUP);
pinMode(BUTTON2, INPUT_PULLUP);
if (Rtc.GetIsWriteProtected())
{ //KHS: RTC 모듈 쓰기 금지 확인 후 해제
lcd.println("RTC protected!");
Rtc.SetIsWriteProtected(false);
}
if (!Rtc.IsDateTimeValid())
{
// Common Causes:
// 1) first time you ran and the device wasn't running yet
// 2) the battery on the device is low or even missing
lcd.println("Lost DateTime!");
//Rtc.SetDateTime(compiled);
}
if (!Rtc.GetIsRunning())
{ //KHS: RTC 모듈이 동작중이 아니라면 구동
lcd.println("RTC activated!");
Rtc.SetIsRunning(true);
}
pinMode(M_IN1, OUTPUT); // Digital4번핀 출력 핀 설정
pinMode(M_IN2, OUTPUT); // Digital5번핀 출력 핀 설정
pinMode(M_IN3, OUTPUT); // Digital13번핀 출력 핀 설정
pinMode(M_IN4, OUTPUT); // Digital12번핀 출력 핀 설정
clThread.onRun(currentTime);
clThread.setInterval(1000);
}
void loop() { // 무한루프
//if(myThread.shouldRun())
clThread.run();
buttonState1 = digitalRead(BUTTON1);
if(buttonState1 == HIGH) //
{
if(state1 == 0)
{
state1 = 1;
}
}
else if(buttonState1 == LOW) //스위치 누름 상태
{
if(state1 == 1)
{
if(beepMelody == 1)
{
if(alm_H == 0)alm_H = 23;
else alm_H -= 1;
stopAlarm();
}
else
{
alm_H += 1;
if(alm_H == 24)
{
alm_H = 0;
}
b_almState = 1;
}
alm = RtcDateTime(2024, 01, 01, alm_H, alm_M, alm_S);
state1 = 0;
delay(100);
}
}
buttonState2 = digitalRead(BUTTON2);
if(buttonState2 == HIGH)
{
if(state2 == 0)
{
state2 = 1;
}
}
else if(buttonState2 == LOW)
{
if(state2 == 1)
{
if(beepMelody == 1)
{
if(alm_H == 0)alm_H = 23;
else alm_H -= 1;
stopAlarm();
}
else
{
alm_M += 5;
if(alm_M == 60)
{
alm_H += 1;
alm_M = 0;
}
b_almState = 1;
}
alm = RtcDateTime(2024, 01, 01, alm_H, alm_M, alm_S);
state2 = 0;
delay(100);
}
}
if(state1 == 0 && state2 == 0)b_almState = 0;
if(b_almState == 0)lcdprintDateTime(2,alm);
else lcdprintDateTime(1,alm);
RtcDateTime ctm = Rtc.GetDateTime();
int Delt_H = abs(ctm.Hour() - alm.Hour());
int Delt_M = abs(ctm.Minute() - alm.Minute());
int Delt_S = abs(ctm.Second() - alm.Second());
if(Delt_H == 0 && Delt_M == 0 && Delt_S < 59)
{
beepMelody = 1;
if (millis() - beepTime >= pgm_read_byte(&Mdur[noteNum])*(1000/(4*tempoRatio)))
{
beepTime = millis();
noTone(beepPin);
octaveTemp = pgm_read_byte(&Moct[noteNum]);
note_t KeyNote = keySignature(pgm_read_word(&Mnote[noteNum]));
tone(beepPin, ledcWriteNote(KeyNote, octaveTemp)); // ledcWriteNote(uint8_t channel, note_t note, uint8_t octaveTemp);
noteNum++;
if (noteNum == sizeof(Mdur))
{ // 초기화
noTone(beepPin);
noteNum = 0;
beepMelody = false;
}
}
if(millis() - millTime >= 2500)
{
Flag_FWDBWD = random(0,2);
Flag_DIRECT = random(0,3);
millTime = millis();
}
moveVehicle();
}
if(!beepMelody)stopAlarm();
}
void currentTime()
{
RtcDateTime now = Rtc.GetDateTime();
lcdprintDateTime(0,now);
if (!now.IsValid())
{
// Common Causes:
// 1) the battery on the device is low or even missing and the power line was disconnected
lcd.println("Lost DateTime!");
}
}
void lcdprintDateTime(int iPos, const RtcDateTime &dt)
{
char timeString[20] = {0,};
if(iPos == 0)
{
snprintf_P(timeString,countof(timeString),PSTR("%02u/%02u %02u:%02u:%02u")
,dt.Month(),dt.Day(),dt.Hour(),dt.Minute(),dt.Second());
lcd.setCursor(0,0);
lcd.print(timeString);
}
else if(iPos == 1)
{
snprintf_P(timeString,countof(timeString),PSTR("ALARM %02u:%02u:%02u")
,dt.Hour(),dt.Minute(),dt.Second());
lcd.setCursor(0,1);
lcd.print(timeString);
}
else
{
snprintf_P(timeString,countof(timeString),PSTR("NO ALARM "));
lcd.setCursor(0,1);
lcd.print(timeString);
}
}
void moveVehicle()
{
if(Flag_FWDBWD == 0)
{
if(millis() - millTime < 500)
{
if(Flag_DIRECT == 0) //직진
{
// 모터 A 정회전
digitalWrite(M_IN1,1); // IN1번에 HIGH(motorA_vector가 0이면 LOW)
digitalWrite(M_IN2,0); // IN2번에 LOW(motorA_vector가 0이면 HIGH)
// 모터 B 정회전
digitalWrite(M_IN3,0); // IN3번에 HIGH(motorB_vector가 0이면 LOW)
digitalWrite(M_IN4,1); // IN4번에 LOW(motorB_vector가 0이면 HIGH)
}
else if(Flag_DIRECT == 1) //죄회전
{
// 모터 A 역회전
digitalWrite(M_IN1,0); // IN1번에 HIGH(motorA_vector가 0이면 LOW)
digitalWrite(M_IN2,1); // IN2번에 LOW(motorA_vector가 0이면 HIGH)
// 모터 B 정회전
digitalWrite(M_IN3,0); // IN3번에 HIGH(motorB_vector가 0이면 LOW)
digitalWrite(M_IN4,1); // IN4번에 LOW(motorB_vector가 0이면 HIGH)
}
else if(Flag_DIRECT == 2) //우회전
{
// 모터 A 정회전
digitalWrite(M_IN1,1); // IN1번에 HIGH(motorA_vector가 0이면 LOW)
digitalWrite(M_IN2,0); // IN2번에 LOW(motorA_vector가 0이면 HIGH)
// 모터 B 역회전
digitalWrite(M_IN3,1); // IN3번에 HIGH(motorB_vector가 0이면 LOW)
digitalWrite(M_IN4,0); // IN4번에 LOW(motorB_vector가 0이면 HIGH)
}
}
else
{
// 모터 A 정회전
digitalWrite(M_IN1,1); // IN1번에 HIGH(motorA_vector가 0이면 LOW)
digitalWrite(M_IN2,0); // IN2번에 LOW(motorA_vector가 0이면 HIGH)
// 모터 B 정회전
digitalWrite(M_IN3,0); // IN3번에 HIGH(motorB_vector가 0이면 LOW)
digitalWrite(M_IN4,1); // IN4번에 LOW(motorB_vector가 0이면 HIGH)
}
}
else
{
if(millis() - millTime < 500)
{
if(Flag_DIRECT == 0) //직진
{
// 모터 A 역회전
digitalWrite(M_IN1,0); // IN1번에 HIGH(motorA_vector가 0이면 LOW)
digitalWrite(M_IN2,1); // IN2번에 LOW(motorA_vector가 0이면 HIGH)
// 모터 B 역회전
digitalWrite(M_IN3,1); // IN3번에 HIGH(motorB_vector가 0이면 LOW)
digitalWrite(M_IN4,0); // IN4번에 LOW(motorB_vector가 0이면 HIGH)
}
else if(Flag_DIRECT == 1) //죄회전
{
// 모터 A 정회전
digitalWrite(M_IN1,1); // IN1번에 HIGH(motorA_vector가 0이면 LOW)
digitalWrite(M_IN2,0); // IN2번에 LOW(motorA_vector가 0이면 HIGH)
// 모터 B 역회전
digitalWrite(M_IN3,1); // IN3번에 HIGH(motorB_vector가 0이면 LOW)
digitalWrite(M_IN4,0); // IN4번에 LOW(motorB_vector가 0이면 HIGH)
}
else if(Flag_DIRECT == 2) //우회전
{
// 모터 A 역회전
digitalWrite(M_IN1,0); // IN1번에 HIGH(motorA_vector가 0이면 LOW)
digitalWrite(M_IN2,1); // IN2번에 LOW(motorA_vector가 0이면 HIGH)
// 모터 B 정회전
digitalWrite(M_IN3,0); // IN3번에 HIGH(motorB_vector가 0이면 LOW)
digitalWrite(M_IN4,1); // IN4번에 LOW(motorB_vector가 0이면 HIGH)
}
}
else
{
// 모터 A 역회전
digitalWrite(M_IN1,0); // IN1번에 HIGH(motorA_vector가 0이면 LOW)
digitalWrite(M_IN2,1); // IN2번에 LOW(motorA_vector가 0이면 HIGH)
// 모터 B 역회전
digitalWrite(M_IN3,1); // IN3번에 HIGH(motorB_vector가 0이면 LOW)
digitalWrite(M_IN4,0); // IN4번에 LOW(motorB_vector가 0이면 HIGH)
}
}
}
void stopAlarm()
{
beepMelody = 0;
noTone(beepPin);
// 모터 A 정지
digitalWrite(M_IN1,0); // IN1번에 HIGH(motorA_vector가 0이면 LOW)
digitalWrite(M_IN2,0); // IN2번에 LOW(motorA_vector가 0이면 HIGH)
// 모터 B 정지
digitalWrite(M_IN3,0); // IN3번에 HIGH(motorB_vector가 0이면 LOW)
digitalWrite(M_IN4,0); // IN4번에 LOW(motorB_vector가 0이면 HIGH)
}
트러블 슈팅 과정
업데이트 예정